Ce réglage se fait par paires. Les tringles de supports de pales étant fixes et rigides, elles ne nécessitent pas de réglage entre elles !
Par contre, on ne sait jamais quelle incidence adopter par défaut. Le réglage du servo anti-couple devant quand même être fait d'une manière ou d'une autre.

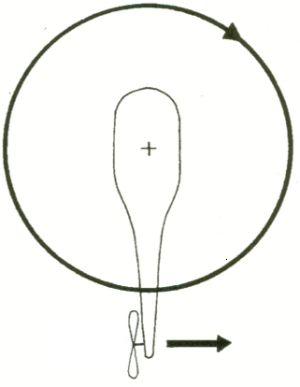
Le sens de l'effort étant remarqué, le point suivant est de soulever l'hélico par le rotor principal d'une main est, avec l'autre, vous exercez le même effort sur la mécanique comme expliqué ci-dessus.
Le fuselage ou mécanique va pivoter dans une direction bien définie !
Il faut alors donner du souffle dans le sens opposé
à la direction de la queue !
Ce test a pour but de simuler le couple du moteur sur la mécanique. Nous
trouvons ainsi la direction du souffle que le rotor anti-couple doit fournir
pour annuler le tournoiement de la mécanique sur elle-même.
PS : Rotor anti-couple => annule le couple du moteur => d'où le terme employé !

C'est maintenant à vous de voir dans quel sens tourne le rotor anti-couple pour savoir si l'incidence des pales arrières doit être positive ou négative !
Il n'y a malheureusement pas de règle générale à adopter pour cette théorie
!
Trop de facteurs pouvant intervenir sur la direction du souffle.
Exemple : De quel côté de la queue se trouve le rotor, le sens de rotation
de l'anti-couple, le sens de rotation du rotor principal et j'en passe
Je vous donne tout de même un croquis comme référence mais apprenez à faire le test ci-dessus. Ce croquis étant rarement sous la main, je n'aurais pas pu faire le réglage au terrain d'une machine appartenant à un pote.
J'enlève la cabine de la machine puis je vais simuler manuellement le même mouvement qu'aurait le moteur en marche en train d'accélérer le rotor !
Il se trouve toujours un pignon ou courroie crantée à disposition pour
faire ce petit test.
Forcer sur ( exemple de la photo ) la courroie crantée ( flèche rouge )
pour obtenir le sens correct du rotor, système tournant à gauche ou à droite
( flèche bleue ).
Comme nous l'avons vu au paragraphe avec le rapporteur d'angle, il y a le moyen de régler l'incidence avec ce gadget => mais c'est trop compliqué, pas bien visible et pas précis !
La lame amovible gauche du rapporteur doit être placée parallèlement au tube de queue.
Ci-dessous ma solution est bien plus simple et précise pour ce réglage !!!!
Le côté de l'incidence étant trouvé avec la simulation du couple de la
machine suspendue ( positive ou négative ) nous pouvons employer une règle
toute simple !
Enclenchez votre radio et l'hélico. Le servo de l'anti-couple doit avoir
le bras de levier bien perpendiculaire au tube de queue ou s'il n'est pas
monté à cet endroit ça ne change rien mais le levier doit être réglé pareil
!
Les commutateurs ou curseurs en position neutre => ce qui supprime la correction
du Gyro !
Le réglage de l'incidence des pales arrières se fera uniquement avec le
déplacement du servo sur le tube de queue.




PS : Il faut impérativement commencer par modifier le point neutre du servo
dans le programme SUB TRIM.
Il est presque impossible d'avoir un réglage du bras de levier au neutre.
Ceci est pratiquement normal et provient d'une denture du palonnier de servo
pas correctement orientée.
C'est la raison pour laquelle il faut réajuster le palonnier avec ce menu.
Par contre, en vue de coupe, les deux sont probablement décalées et c'est normal !
Ça peut varier d'après les modèles entre 2 et 3 centimètres.
Avant de vous faire peur avec les facteurs décisifs ci-dessous, quoiqu'il arrive, si vous restez entre ces deux valeurs, c'est bon !!!
PS : J'ai entendu dernièrement sur le terrain que l'on règle l'incidence
à 0° donc plus 2 à 3 centimètres comme sur la photo mais 0 centimètre.
Un mode verrouillage de CAP aucun problème, le servo va simplement être
décalé d'un côté ou de l'autre.
Mais un petit conseil sympa, ne passez pas en mode non verrouillé lors du
vol ! Vous aurez une belle surprise !
Une jolie pirouette non voulue ! Ok si vous aimez une augmentation instantanée
de la pulsation du cur, laissez-le comme ça !
Mais chacun fait comme il veut, je ne donne que des conseils, c'est tout.
Ensuite le seul réglage à faire sur le gyro GY 401, est de commencer a programmer les 50 % de la course sur la voie 4 et 5. Il y a un potentiomètre mécanique sur le gyro qui limite les courses maxis que le servo peut faire sans toucher à une butée mécanique gauche ou droite. Le réglage du gyro est avec ce dernier point, terminé. Surtout ne mettez pas de délay ( deuxième poti )
C'est avec la voie 4 que vous réglez la vitesse de la pirouette ( 1 tour
sur lui même ). Ne réglez pas à la base trop de course, la pirouette sera
longtemps assez rapide au début.
Contrôlez la vitesse de la pirouette à gauche et à droite ! Si le pourcentage
est programmé égal, elle sera sûrement plus rapide dans un sens que dans
l'autre !
Pourquoi y a-t-il une différence de vitesse entre la pirouette à gauche
et celle exécutée à droite alors que le pourcentage de la voie est égal
?
Il y a une nette différence entre les deux sens, la pirouette suivant le
côté du couple tourne plus vite que celle effectuée contre le couple.
Nous apercevons rapidement avec l'ouï que le régime du système à tendance
à augmenter dans le sens du couple alors que la contre couple freine, ralentit
le système du fait du surplus de puissance employé par le rotor arrière
qui doit finalement être compensé par le moteur.
A modifier pour obtenir une pirouette autant régulière, question vitesse,
dans un sens ou dans l'autre !
Sur mon modèle Genesis j'ai 75 % sur la course de la voie N°4 à gauche et
85 % de l'autre côté !
Ce dernier réglage se traduit par une pirouette à
vitesse égale dans les deux sens !
Cette vitesse égale est primordiale ! Sinon il y a le risque que vous vous
sentiez plus à l'aise pour une pirouette 540° exécutée dans le sens des
aiguilles que dans le sens opposé !
Ceci est à éviter => pour devenir un bon pilote, les figures doivent se piloter aussi bien dans les deux SENS.
Question sens de contrôle du gyro ( reverse ou normal ) je ne fais jamais
de test à l'atelier mais sur le terrain !
Le test en vol nous amène à bien se concentrer et vraiment faire gaffe au
premier décollage.
Un gyro contrôlant dans la mauvaise direction l'anti-couple, vous gère une
pirouette en version SUPER accélérée.
Nous remarquons de suite s'il contrôle juste ou faux !
Attention : L'inversion du contrôle ne se fait pas dans la radio mais bien
sur le gyro et donc mécanique. Nouveau décollage et si tout s'est bien passé,
c'est bon.
Un contrôle sur la direction ( voie N° 4 ) si le museau de la machine tourne
dans le bon sens.
Ne faites pas l'erreur de regarder la direction de la queue. Un manche
déplacé sur la gauche fait partir le MUSEAU
de l'hélico à gauche et non LA QUEUE à gauche.
S'il s'est avéré que le museau part dans la mauvaise direction, il faut
inverser la voie N° 4 et je ne suis pas sûr mais le gyro peut à nouveau
contrôler dans le mauvais sens !
Petit truc pour savoir si le gyro est un mode verrouillage de CAP ou NON.
En mode verrouillé, le neutre du servo se déplace en bougeant le manche
de gauche à droite.
Une fois le manche de la radio en position neutre, le servo peut très bien
se situer complètement à côté et y rester, là c'est la preuve qu'il est
en mode V. de CAP.
Dans le cas contraire ( non verrouillé ) le servo se replace à coup sûr au neutre parfait.
Sachez qu'avec un verrouillage de CAP et le contrôle inversé du gyro, le
pilotage est quand même possible mais nous remarquons des réactions bizarres
au niveau de l'anti-couple.
Il va cependant tout de même garder le CAP mais c'est la meilleure façon
de lui faire perdre la boule. Il remarque un changement de direction, il
contre de suite avec le servo, cette correction étant fausse, le pauvre
re-contre par-dessus et remet la queue en place, pour lui un effet contraire
à la logique qu'il ne comprend pas. Pour finir, le re-contrage sur re-contrage
lui amène à ne plus savoir lui-même ce qu'il faut faire et de ce fait peut
le déglinguer et il place le servo dans une position si mauvaise que la
machine part en crash.
D'ailleurs, si dans ce cas vous diminuez la sensibilité du gyro à tel point
qu'un vol normal peut être envisageable.
Si vous n'êtes pas en verrouillage de CAP la question ne se pose pas et
le vol avec un contrôle inversé N'EST PAS POSSIBLE.
Fréquence de rotation adoptée en vol (la plus souvent employée par défaut)
Le type de pale principales ( plus elles sont fines moins il y a d'effort
sur le rotor principal )
Les pales arrières ( plus elles sont épaisses, plus on augmente le rendement
à basse vitesse )
Les pales arrières ( plus elles sont fines, plus on augmente le rendement
à haute vitesse )
Le rapport de fréquence de rotation entre le rotor principal et le rotor
arrière.
( un rapport classique => principal / 1500 tr. -- anti-couple / 6000tr.
donc ¼ )
Exemple :
Le Futura qui a un rapport moyen entre l'anti-couple et le principal, sera réglé avec 2,5 centimètres.
Le Genesis qui a un rapport entre anti-couple et principal élevé ( 1 / 4.88), sera réglé avec 2 centimètres.
L'Ecureuil qui possède un rotor principal quadripales ( couple sur le fuselage
plus élevé ) est muni d'un boîtier anti-couple Vario dont le rapport avec
le rotor principal est mauvais, je vais donc passer exceptionnellement les
3 centimètres. Ce n'est pas très performant comme réglage.
Dans le cas de l'Ecureuil, je préfère augmenter le rapport !
Les pales anti-couple trop inclinées finissent par freiner le rotor arrière
et emploient plus de puissance motrice. Même avec l'inconvénient qu'ont
les boîtiers anti-couple Vario montés sur des hélicos d'autres marques,
ce dernier fabricant a prévu des pignons internes au boîtier avec des nombres
de dents différentes.
Ce changement augmente le rapport et, par conséquent, le rotor de queue
est accéléré de cette façon.
Attention, ça ne veut pas dire que les mécaniques arrières Vario tournent
moins vite, pas du tout, mais chez eux, un rapport plus grand est créé à
l'entrée du système de transmission. En d'autres termes, le tube carbone,
alu ou corde à piano tourne plus vite à l'intérieur de la poutre de queue.

Le prix des deux supports de tubes de queue me serait revenu à passé 30
balles !
Trop cher pour ce que c'est ! J'ai sur ce modèle simplement pris une plaque
universelle de 3 mm. d'épais que j'ai découpée, limée et ajustée !
Petit désavantage, le réglage se modifie lors d'un changement de la tension
de la courroie. La tige carbone de 4 mm. qui sert de commande anti-couple
doit être réglable en longueur !
PS : Désolé pour la photo en peu trop sombre.